Diffusion Adversarial Post-Training for One-Step Video Generation
Authors: Shanchuan Lin, Xin Xia, Yuxi Ren, Ceyuan Yang, Xuefeng Xiao, Lu Jiang Affiliations: ByteDance Seed arXiv: 2501.08316 Project Page: seaweed-apt.com Venue: ICML 2025 Code: 未开源 (相关后续工作 SeedVR2 已开源)
1. Motivation (研究动机)
1.1 核心问题
Diffusion model 的迭代采样过程非常缓慢, 生成高分辨率视频 (如 1280x720, 24fps, 2秒) 在 H100 上需要数分钟。现有的 diffusion step distillation 方法存在以下问题:
- 质量显著下降: 现有 distillation 方法在 one-step 生成时质量严重退化, 特别是在细节、结构完整性和文本对齐方面
- 视频生成受限: 已有工作仅在小规模低分辨率视频 (512x512, 16帧) 上进行蒸馏, 高分辨率视频的 one-step 生成此前尚未实现
- 蒸馏范式的局限: 传统 distillation 方法以预训练 diffusion model 为 teacher, 生成的质量天然受限于 teacher 的上限
1.2 关键洞察
作者提出了一个不同于 distillation 的范式: Adversarial Post-Training (APT) — 不再将预训练的 diffusion model 作为 teacher 来蒸馏, 而是仅将其作为初始化, 然后直接对 real data 进行 adversarial training。这类似于 supervised fine-tuning (SFT) 在 post-training 阶段的角色。
这带来两个关键优势:
- 省去了预计算大量 teacher 样本的成本
- 生成质量不再受限于 teacher, 在 visual fidelity 上甚至可以超越 25-step diffusion model
2. Idea (核心思想)
核心思路: 将 text-to-video diffusion model 转化为 one-step generator, 通过在 diffusion pre-training 之后追加 adversarial post-training 阶段, 直接对 real data 进行 GAN-style 训练。
具体来说:
- 先用 consistency distillation 初始化 generator (提供粗略的 one-step 能力)
- 用预训练 diffusion model 权重初始化 discriminator (共享相同的 DiT 架构)
- 在 real data 上进行标准 adversarial training, 配合近似 R1 regularization 保证训练稳定性
这是目前报道的最大规模 GAN (~16B 参数), 同时支持 image 和 video 生成。
3. Method (方法)
3.1 总体架构

Figure 1 解读: 左侧是 Generator Transformer (36层), 从 consistency model 初始化; 中间是 Discriminator Transformer (36层), 从原始 diffusion model 初始化。两者共享相同的 MMDiT 架构。右侧展示了 discriminator 的额外 output head: 在第16、26、36层添加 cross-attention-only transformer block, 用单个 learnable token 作为 query, 对所有 visual token 做 cross-attend, 产生 scalar logit。多层 feature 的 channel-concatenation 最终产生标量输出。
3.2 Generator
Generator 的初始化分两步:
Step 1: Consistency Distillation 初始化
首先用 consistency distillation (Song et al., 2023; Song & Dhariwal, 2024) 配合 MSE loss 预训练一个基础的 one-step 模型 :
其中 是噪声, 是文本条件, 是最终 timestep, CFG scale 固定为 7.5。
Step 2: 定义 Generator
以 consistency model 为初始化, 定义 generator:
即 generator 输出的是去噪后的 clean sample prediction。
# Pseudocode: Generator 初始化与前向
class Generator(nn.Module):
def __init__(self, pretrained_consistency_model):
self.dit = copy.deepcopy(pretrained_consistency_model)
def forward(self, z, c):
# z: noise sample, c: text condition
# 固定 timestep 为 T (最终时刻)
v_pred = self.dit(z, c, t=T) # velocity prediction
x_pred = z - v_pred # clean sample prediction
return x_pred3.3 Discriminator
Discriminator 的设计包含三个关键决策:
1) 从 diffusion model 初始化 (非 consistency model)
实验发现用原始 diffusion 权重初始化效果更好。
2) Multi-layer feature aggregation
在第 16、26、36 层添加 cross-attention output head:
# Pseudocode: Discriminator multi-layer logit head
class DiscriminatorHead(nn.Module):
def __init__(self, hidden_dim, num_layers=3):
# 在 layer 16, 26, 36 各添加一个 cross-attention block
self.cross_attn_blocks = nn.ModuleList([
CrossAttentionBlock(hidden_dim) for _ in range(num_layers)
])
self.learnable_query = nn.Parameter(torch.randn(1, 1, hidden_dim))
self.proj = nn.Linear(hidden_dim * num_layers, 1)
def forward(self, features_list):
# features_list: [feat_16, feat_26, feat_36], 每个是 visual tokens
tokens = []
for feat, block in zip(features_list, self.cross_attn_blocks):
# 单个 learnable token 做 query, visual tokens 做 key/value
token = block(query=self.learnable_query, kv=feat) # [B, 1, D]
tokens.append(token)
# Channel concatenation + projection
concat = torch.cat(tokens, dim=-1) # [B, 1, 3D]
logit = self.proj(concat).squeeze() # [B]
return logit3) Timestep ensemble (用不同 timestep 输入)
由于 discriminator 从 diffusion model 初始化, 而 diffusion model 在 时无意义, 所以对输入 timestep 做 ensemble:
其中 shift 函数为:
是由 latent 维度决定的超参数, image 用 , video 用 。
# Pseudocode: Discriminator timestep ensemble
class Discriminator(nn.Module):
def __init__(self, pretrained_diffusion_model):
self.dit = copy.deepcopy(pretrained_diffusion_model)
self.head = DiscriminatorHead(hidden_dim=dit.hidden_dim)
def forward(self, x, c):
# 采样随机 timestep 并做 shift
t = torch.rand(1) * T # uniform from [0, T]
t_shifted = (s * t) / (1 + (s - 1) * t)
# 前向 DiT, 收集多层 feature
features = self.dit.forward_with_features(x, t_shifted, c,
extract_layers=[16, 26, 36])
logit = self.head(features)
return logit直接输入 clean data: Discriminator 直接接收 clean sample 或 (不加噪), 而 timestep ensemble 是对 discriminator 内部的条件化。
3.4 Approximated R1 Regularization
标准 R1 regularization 需要二阶梯度:
但 PyTorch FSDP、gradient checkpointing、FlashAttention 等均不支持 double backward。作者提出近似 R1:
即用有限差分近似梯度: 对 real data 加小方差 ( for images, for videos) 高斯噪声, 鼓励 discriminator 在 real data 附近的预测平滑。
# Pseudocode: Approximated R1 Regularization
def approx_r1_loss(discriminator, x_real, c, sigma=0.01):
"""
近似 R1: 不需要二阶梯度, 兼容 FSDP / FlashAttention
核心思想: D(x) 应约等于 D(x + noise), 即 D 在 real data 附近平滑
"""
# 对 real data 加小扰动
x_perturbed = x_real + sigma * torch.randn_like(x_real)
# 计算两者的 discriminator output 差异
d_real = discriminator(x_real, c)
d_perturbed = discriminator(x_perturbed, c)
loss_ar1 = (d_real - d_perturbed).pow(2).mean()
return loss_ar1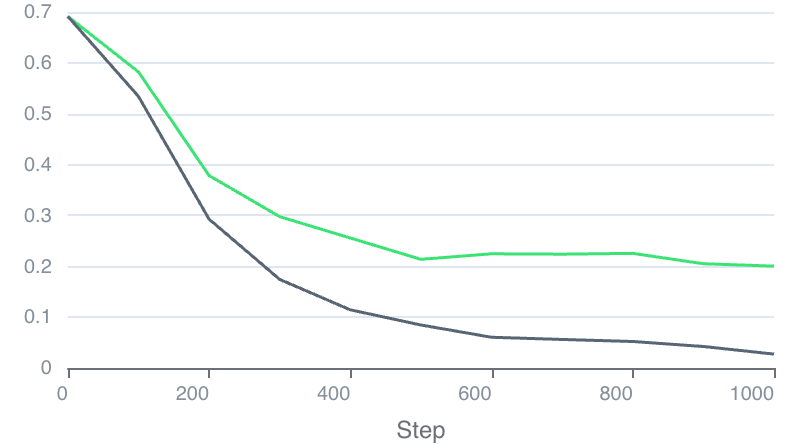
Figure 5 解读: 上图展示了有/无 approximated R1 regularization 的训练曲线对比。黑色曲线 (无正则化) 的 discriminator loss 快速降到零, 训练崩溃, generator 产出 mode collapse 的彩色色块。绿色曲线 (有正则化) 的 discriminator loss 保持健康水平, 不会降到零, 训练稳定。这证明 approximated R1 对于防止训练崩溃至关重要。

Figure 3 解读: 这组四张图展示了训练崩溃时生成器输出的彩色块状结果,对应无正则化情况下的 mode collapse 现象。
3.5 训练目标
Discriminator loss (使用 non-saturating GAN loss + approximated R1):
其中 , , 。
Generator loss:
其中 。
# Pseudocode: 完整训练循环
def train_step(generator, discriminator, real_batch, lambda_r1=100, sigma=0.01):
x_real, c = real_batch # real latent, text condition
# === Discriminator step ===
z = torch.randn_like(x_real)
x_fake = generator(z, c).detach()
d_real = discriminator(x_real, c)
d_fake = discriminator(x_fake, c)
# Non-saturating GAN loss
loss_d = -F.logsigmoid(d_real).mean() - F.logsigmoid(-d_fake).mean()
# Approximated R1
x_perturbed = x_real + sigma * torch.randn_like(x_real)
d_perturbed = discriminator(x_perturbed, c)
loss_ar1 = (d_real - d_perturbed).pow(2).mean()
loss_d_total = loss_d + lambda_r1 * loss_ar1
loss_d_total.backward()
optimizer_d.step()
# === Generator step ===
z = torch.randn_like(x_real)
x_fake = generator(z, c)
d_fake = discriminator(x_fake, c)
loss_g = -F.logsigmoid(d_fake).mean()
loss_g.backward()
optimizer_g.step()
# EMA update
ema_update(generator_ema, generator, decay=0.995)3.6 训练细节
| 阶段 | 数据 | GPU | Batch Size | LR | 训练步数 | EMA |
|---|---|---|---|---|---|---|
| Image APT | 1024px images | 128~256 H100 | 9062 | 5e-6 | 350 (EMA) | decay=0.995 |
| Video APT | 1280x720, 24fps, 2s | 1024 H100 | 2048 | 3e-6 | 300 | decay=0.995 |
- Optimizer: RMSProp (), 等价于 Adam (), 比标准 Adam 节省显存
- 训练精度: BF16 mixed precision
- Video 阶段的 generator 从 image EMA checkpoint 初始化, discriminator 重新从 diffusion weights 初始化
- 无 weight decay, 无 gradient clipping
4. Experimental Setup (实验设置)
4.1 Base Model
基于 Seaweed-7B (Seawead et al., 2025) — 一个基于 MMDiT 架构的 text-to-video diffusion model:
- 36 层 transformer blocks, 共 8B 参数
- Flow matching objective (Lipman et al., 2023)
- 在 latent space 中操作 (Rombach et al., 2021)
- 支持任意分辨率的图片和视频生成
4.2 评估
Image 评估:
- 300 randomly selected prompts from PartiPrompt + DrawBench
- 3 images per prompt
- Baseline: FLUX-Schnell, SD3.5-Turbo, SDXL-DMD2, SDXL-Hyper, SDXL-Lightning, SDXL-Nitro-Realism, SDXL-Turbo
Video 评估:
- 96 custom prompts, 1 video per prompt
- VBench metrics
- 与 25-step diffusion baseline 对比
User Study: 3 个评价维度 — visual fidelity, structural integrity, text alignment, 共 50,328 sample comparisons。
5. Experimental Results (实验结果)
5.1 Image 定性结果




Figure 2 解读: 左侧是 25-step diffusion + CFG 的结果, 右侧是 1-step APT 的结果。APT 生成的图像色调更真实自然 (diffusion + CFG 容易过曝和过饱和), 细节更丰富。这是 APT 超越 teacher 的直观证据 — 因为它直接从 real data 学习, 而非受限于 CFG 产生的 synthetic 分布。
5.2 Image 定量结果 (User Study)
Table 1: One-Step vs. 25-Step Diffusion
| Method | Visual Fidelity | Structural Integrity | Text Align |
|---|---|---|---|
| FLUX-Schnell | -36.6% | -24.4% | -2.8% |
| SD3.5-Large-Turbo | -94.4% | -30.1% | -20.4% |
| SDXL-DMD2 | -9.3% | -16.8% | -4.6% |
| APT (Ours) | +37.2% | -13.1% | -8.1% |
APT 是唯一在 visual fidelity 上超越 25-step diffusion 的 one-step 方法 (+37.2%), 但在 structural integrity 和 text alignment 上仍有退化。
Table 2: vs. SOTA One-Step Methods (Absolute Preference)
| Method | Visual Fidelity | Structural Integrity | Text Align | Average |
|---|---|---|---|---|
| FLUX-Schnell | +35.7% | -21.5% | -28.1% | -4.6% |
| SDXL-DMD2 | +34.7% | +10.3% | -11.8% | +11.1% |
| SDXL-Lightning | +34.1% | +14.1% | +11.4% | +19.9% |
| SDXL-Turbo | +68.9% | +14.9% | -7.9% | +25.3% |
APT 在 absolute preference 上排名第二 (仅次于 FLUX-Schnell), relative preference 排名第一。Visual fidelity 全面领先所有方法。
5.3 Video 结果



Figure 4 解读: 上排为 25-step diffusion (50 NFE), 中排为 2-step APT (2 NFE), 下排为 1-step APT (1 NFE)。APT 在好的 case 中增强了细节和真实感。但 one/two-step 模型在 structural integrity 和 text alignment 上仍不如 25-step。
Table 4: Video User Study
| Method | Steps | Visual Fidelity | Structural Integrity | Text Align |
|---|---|---|---|---|
| APT | 2 | +32.3% | -31.3% | -9.4% |
| APT | 1 | +10.4% | -38.5% | -8.3% |
Table 7: VBench Metrics
| Method | Steps | Total Score | Quality Score | Semantic Score |
|---|---|---|---|---|
| Diffusion | 25 | 82.15 | 84.36 | 73.31 |
| Consistency | 1 | 67.05 | 73.78 | 40.15 |
| APT | 1 | 82.00 | 84.21 | 73.15 |
APT 1-step 的 VBench total score (82.00) 接近 25-step diffusion (82.15), 远超 consistency baseline 1-step (67.05)。
5.4 推理速度
Table 8: Inference Speed (1280x720, 24fps, 2s video)
| H100 数量 | Text Encoder | DiT | VAE | Total |
|---|---|---|---|---|
| 1 | 0.28s | 2.65s | 3.10s | 6.03s |
| 4 | 0.28s | 0.73s | 1.19s | 2.20s |
| 8 | 0.28s | 0.50s | 1.19s | 1.97s |
8 张 H100 可实现实时 one-step 视频生成 (<2s 生成 2s 视频)。
5.5 Ablation Studies
Discriminator 深度: Full-depth (36层) > Two-thirds > Half-depth



Figure 6 解读: 从左到右分别是 half-depth (layer 14,16,18), two-thirds-depth (layer 18,22,26), full-depth (layer 16,26,36) discriminator 的生成结果。更深的 discriminator 利用了预训练网络的完整表征能力, 生成质量更高。
Multi-layer vs. Single-layer features:


Figure 7 解读: 左图仅使用最后一层 (layer 36) 的 discriminator, 右图使用多层 (layer 16,26,36) discriminator。多层 feature 显著提升了 structural correctness — 因为不同层捕获不同粒度的结构信息。
Training progression:








Figure 9 解读: 训练进度 (EMA model, 从左到右: 0, 1000, 2000, 3000, 5000, 7000, 8000, 10000 steps)。模型在约 50 步后就能生成清晰图像, EMA 模型在 350 步时质量达到峰值, 之后开始退化 (structural degradation 加剧)。
Batch size 对 video 的影响:


Figure 10 解读: 左图 batch size 256, 右图 batch size 1024。小 batch size 导致 mode collapse (不同 prompt 和 seed 产生相似结果), 大 batch size 避免了此问题。这与先前 GAN 研究中大 batch 有助于稳定性的结论一致。
Learning rate 策略:



Figure 11 解读: 从左到右: freeze backbone (只训新参数), 降低 backbone LR, 全参数相同 LR。Freeze backbone 产生不自然 artifacts, 低 LR 收敛太慢, 全参数相同 LR 效果最好。
5.6 Structural Degradation 分析



Figure 8 解读: Latent interpolation 实验显示, one-step generator 在 mode 之间的过渡区域容易出现 structural incorrectness。作者假设这是因为 generator 容量不足 (under-capacitated) — 36 层 transformer 要在单次前向中完成原本需要迭代 25 步的生成过程。这也是 text alignment 退化的主要原因之一。
5.7 Visual Improvement 的原因
CFG 会将生成分布推离真实数据分布, 产生 over-exposed、over-saturated 的 synthetic 外观。APT 直接从 real data 学习, discriminator 作为 learnable perceptual critic 引导 generator 学习更接近真实数据的分布, 因此在 visual fidelity 上能超越使用 CFG 的 diffusion model。
总结
| 维度 | 结论 |
|---|---|
| 核心贡献 | 提出 APT 范式: 直接对 real data 做 adversarial post-training, 取代 distillation |
| 关键创新 | Approximated R1 regularization (兼容 FSDP/FlashAttention), multi-layer discriminator, timestep ensemble |
| 主要优势 | Visual fidelity 超越 25-step diffusion; 首个高分辨率 one-step video generation |
| 主要局限 | Structural integrity 和 text alignment 退化; 视频仅 2 秒; generator 容量受限 |
| 规模 | ~16B 参数 (目前最大 GAN), 1024 H100 训练 |
| 后续工作 | SeedVR2 将 APT 应用于 video restoration, 发表于 ICLR 2026 |